

Le moteur électrique représente l’une des avancées les plus significatives de l’histoire de l’électrotechnique. Cette machine électrotechnique convertit l'énergie électrique en énergie mécanique, déclenchant le mouvement de divers appareils et machines. Son fonctionnement est essentiellement à l’opposé d’un générateur électrique, qui convertit l’énergie mécanique en énergie électrique.
Le concept du moteur électrique s'est consolidé grâce aux découvertes fondamentales de pionniers tels que Franz Ernst Neumann et James Clerk Maxwell en 1841 et 1873 respectivement. Ces scientifiques ont jeté les bases théoriques qui ont permis le développement et l’application pratique des moteurs électriques dans diverses industries et domaines de la vie quotidienne.
Depuis lors, les moteurs électriques ont révolutionné la façon dont nous interagissons avec la technologie moderne, alimentant une large gamme d’appareils et de systèmes, depuis les appareils électroménagers jusqu’aux machines industrielles à grande échelle. Leur polyvalence et leur efficacité en font des éléments indispensables à l’ère de l’électrification, contribuant au progrès et à l’innovation dans le monde.
Types de moteurs électriques
Les moteurs électriques sont principalement classés en fonction du type de courant électrique qu’ils utilisent :
1. Moteurs à courant continu (CC)
Les moteurs à courant continu utilisent une source d’alimentation CC pour fonctionner. Ces moteurs sont largement utilisés dans diverses applications en raison de leur capacité à offrir un contrôle précis de la vitesse et du couple.
Dans cette catégorie, vous pouvez trouver le moteur à induction permanente, qui utilise des aimants permanents dans le rotor, et le moteur à induction contrôlé, qui permet de faire varier la vitesse de manière contrôlée.
2. Moteurs à courant alternatif (AC)
Les moteurs à courant alternatif sont alimentés par une source de courant alternatif. Ces moteurs sont extrêmement courants dans de nombreuses applications industrielles et domestiques en raison de leur simplicité de conception et de leur faible coût. Ce type de moteur est le plus utilisé dans les véhicules électriques, notamment le moteur à aimant permanent synchrone à courant alternatif.
Les moteurs à courant alternatif peuvent être subdivisés en plusieurs catégories, notamment :
- Moteur universel : Ce type de moteur peut fonctionner aussi bien en courant continu qu’en courant alternatif. Ils se caractérisent par leur vitesse élevée et leur capacité à fournir un couple élevé.
- Moteur synchrone : Dans ce type de moteur, la vitesse du rotor est synchronisée avec la fréquence du courant alternatif fourni. Ils sont utilisés dans des applications qui nécessitent une vitesse constante et précise, mettant en évidence leur utilisation dans les voitures électriques.
- Moteur asynchrone (Induction) : Également connu sous le nom de moteur à induction, ce type de moteur est le plus couramment utilisé dans les applications industrielles et commerciales en raison de son faible coût et de sa robustesse.
En plus de ces classifications plus traditionnelles, des moteurs plus modernes sont apparus qui répondent à des besoins spécifiques dans diverses applications, tels que les moteurs pas à pas, utilisés dans les systèmes de positionnement et de contrôle de précision, et les moteurs linéaires, qui offrent un mouvement linéaire direct en rotation.
Comment fonctionne un moteur électrique ?
Le fonctionnement d’un moteur électrique varie selon le type de moteur dont il fait partie.
Fonctionnement d'un moteur à courant continu à induction permanente
Le moteur à courant continu est le moteur le plus simple. En allant de l'extérieur du moteur vers l'intérieur on trouve :
- Le carter ou carter, qui possède un système de fixation au banc ou au châssis. Dans le carter se trouve un ensemble appelé stator ou inducteur qui est composé d'un support en tôle et de quelques aimants ou électro-aimants.
- Le rotor, qui est formé d'un noyau de tôles sur un axe qui supporte le tout. L'arbre est entouré d'une série d'enroulements reliés aux ailettes du collecteur. Le courant électrique est reçu à travers les ailettes du collecteur. Tout cela est soutenu par les roulements aux extrémités du carter.
- D'un côté de l'arbre se trouve la poulie. La poulie est une couronne dentée ou un accouplement qui transmet l'énergie mécanique à utiliser.
Lorsque le courant est envoyé à travers les balais jusqu'au collecteur, un courant électrique passe à travers les conducteurs des bobines, ce qui, par la règle de gauche (rappelez-vous qu'ils sont immergés dans le champ du stator), crée une force latérale, et la somme de tous nous donne le couple qui fait tourner le rotor ou l’ensemble moteur. Grâce au collecteur, le courant est transmis aux bobines appropriées afin que cette paire soit aussi puissante que possible. Ce sont les moteurs des appareils alimentés par des piles ou des batteries.
Moteur à courant continu à induction variable et courant alternatif universel
C'est la même chose que le moteur à induction permanente, mais dans ce cas, ce qui produit le champ, ce sont des bobines qui fonctionnent comme un électro-aimant et qui sont connectées au rotor en série ou en parallèle. Ce moteur fonctionne également avec du courant alternatif monophasé. L’exemple le plus courant est celui des moteurs d’appareils électroménagers normaux.
moteur électrique asynchrone à courant alternatif
Dans un moteur asynchrone, il y a trois groupes d'enroulements dans le stator. Ces enroulements correspondent aux trois phases du courant alternatif commercial, et le rotor, au lieu du collecteur, comporte trois anneaux qui sont connectés aux enroulements du rotor. Ce type de moteur électrique fonctionne selon le même principe, même si en raison du déplacement entre les phases, il se produit un champ tournant qui entraîne d'une certaine manière le rotor.
Un cas particulier largement utilisé est le moteur à cage d’écureuil, car il s’agit d’un moteur très simple. Dans lequel les fines et les enroulements du rotor sont remplacés par des tiges avec des anneaux aux extrémités joignant les tiges, d'où son nom.
Dans les moteurs asynchrones à courant alternatif, les enroulements peuvent être connectés de deux manières : En étoile, lorsqu'une extrémité des bobines est commune et l'autre connectée à chacune des phases. L'autre est en triangle, lorsque les extrémités des bobines sont connectées les unes aux autres et en une seule phase. L'échange de deux phases provoque l'inversion du sens de rotation.
C'est le moteur le plus utilisé dans l'industrie, avec le système de démarrage étoile-triangle.
Moteur électrique AC synchrone
Le moteur synchrone est ainsi appelé car la vitesse de rotation est liée à la fréquence du courant d'alimentation. Cette caractéristique est due au fait que le rotor est alimenté en courant continu et est entraîné par le champ tournant produit par les bobines du stator.
Normalement, ce moteur à courant alternatif possède une dynamo couplée au même arbre moteur pour alimenter le rotor. Comme la vitesse varie avec la fréquence et permet de régler le couple moteur avec une consommation minimale, en étant couplée à un oscillateur, sa vitesse peut être variée très facilement et est donc utilisée dans les systèmes de traction (AVE-TGV).
Moteur pas à pas
Le moteur pas à pas est alimenté en courant continu et le rotor contient une série d'aimants permanents, qui sont entraînés par les bobines du stator, qui sont régies par l'électronique de puissance, déterminant l'angle de rotation, qui ont un contrôle proportionnel. , sont extrêmement précis dans l'angle de rotation ou la position. Ces moteurs sont largement utilisés dans les servos de mouvement des machines à commande numérique ou dans les moteurs de lecture/écriture des disques durs d'ordinateurs.
Moteur linéaire
Fondamentalement, un moteur linéaire est un moteur asynchrone qui a été développé, donc au lieu de créer un couple de rotation, il crée un déplacement linéaire, par le déplacement des phases. Ces moteurs sont divisés en deux grands groupes :
- Ceux à accélération lente utilisés dans les transports Sky Train, Maglev, etc.
- D'accélération rapide utilisée dans des armes telles que le canon magnétique et les appareils spatiaux.
Au sein de la même catégorie se trouvent les pompes à induction électromagnétiques qui permettent la circulation de fluides conducteurs. Les premiers tests ont été réalisés avec du mercure, puis avec un mélange de sodium et de potassium, compte tenu de la circulation du sodium pour le refroidissement dans certaines centrales nucléaires.
Efficacité et performances
 L'efficacité et les performances des moteurs électriques sont des aspects critiques qui ont un impact sur leur applicabilité, leurs coûts d'exploitation et leur empreinte environnementale. Les concepts clés liés à l’efficacité et aux performances de ces moteurs sont examinés ci-dessous :
L'efficacité et les performances des moteurs électriques sont des aspects critiques qui ont un impact sur leur applicabilité, leurs coûts d'exploitation et leur empreinte environnementale. Les concepts clés liés à l’efficacité et aux performances de ces moteurs sont examinés ci-dessous :
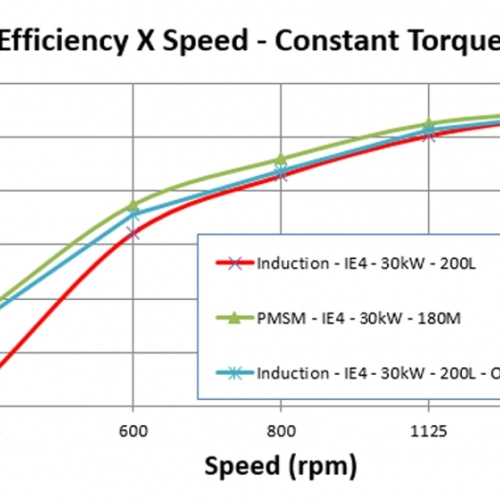
- L'efficacité énergétique est définie comme la relation entre la puissance de sortie utile et la puissance électrique d'entrée, déterminant la capacité du moteur à convertir l'énergie électrique en travail mécanique. Les moteurs modernes sont conçus pour atteindre des niveaux élevés d’efficacité tout en réduisant la consommation d’énergie.
- Malgré les progrès en matière de conception, les moteurs subissent encore des pertes , notamment la résistance électrique dans les enroulements (pertes en cuivre), l'hystérésis et les courants de Foucault dans les matériaux magnétiques, les pertes mécaniques dues aux charges de friction et d'inertie, ainsi que les pertes dans les roulements. Minimiser ces pertes est essentiel pour améliorer l’efficacité.
- La courbe d'efficacité montre que les moteurs atteignent leur niveau optimal à proximité de leur charge nominale, leur efficacité diminuant à des charges inférieures ou supérieures.
Les fabricants recherchent constamment des améliorations d'efficacité , telles que l'utilisation de matériaux conducteurs de haute pureté, la conception aérodynamique des rotors et des stators et des technologies de contrôle avancées pour optimiser les performances en temps réel.
D’un autre côté, pour favoriser l’adoption de moteurs plus efficaces, de nombreuses régions ont établi des réglementations et des normes qui imposent des exigences minimales en matière d’efficacité. Ces réglementations, telles que les cotes d'efficacité énergétique de l'EPA et de la Commission européenne, encouragent l'adoption de technologies plus efficaces, contribuant à la réduction de la consommation d'énergie et des émissions de carbone.
Histoire des moteurs électriques
En 1821, suite à la découverte du phénomène de l'électromagnétisme par le chimiste danois Hans Christian Ørsted, le physicien anglais Michael Faraday construit deux appareils pour produire ce qu'il appelle la rotation électromagnétique. Ces dispositifs consistent en un mouvement circulaire continu d'un champ magnétique autour d'un fil. Lors de la démonstration, la première description fut celle du moteur électrique actuel, à courant alternatif, breveté en 1887 par le physicien serbe Nikola Tesla.
En 1822, Peter Barlow crée la roue de Barlow. La roue de Barlow est un widget constitué d'un disque métallique découpé en étoile, les extrémités de l'étoile sont immergées dans un entrefer contenant du mercure. La fonction du mercure est d'assurer le passage du courant.
Le premier interrupteur utilisable a été inventé en 1832 par William Sturgeon. Plus tard, en 1834, M. Thomas Davenport fabriqua un moteur à courant continu grâce à cette invention. Le moteur à courant continu fut breveté en 1837. Le coût élevé des batteries ne permit pas à ces moteurs électriques de connaître un premier succès significatif.
On ne sait pas très bien qui est le père des machines asynchrones. Ce titre est disputé par trois inventeurs : Nikola Tesla, Galileo Ferraris et Michail Ossipowitsch.
En 1887, le physicien Nikola Tesla dépose un brevet sur la machine asynchrone. L'année suivante, il dépose 5 autres brevets pour des machines électriques asynchrones. Parallèlement, Galileo Ferraris publiait des traités sur les machines tournantes.
En 1885, Ferraris publia une expérience puis publia une théorie sur le moteur asynchrone en avril 1888. Enfin, en 1889, un électricien allemand d'origine russe nommé Michail Ossipowitsch Doliwo-Dobrowolski inventa le premier moteur asynchrone triphasé à cage d'écureuil. Ce dernier moteur électrique fut construit industriellement à partir de 1891.