Un moteur asynchrone est un moteur électrique alimenté en courant alternatif dans lequel la vitesse de rotation du rotor est différente de celle du champ magnétique du stator. Ce type de moteur est également appelé moteur à induction.
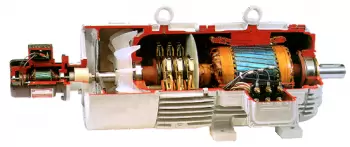
Le moteur à induction est composé d'un rotor et d'un stator, dans lesquels se trouvent les bobines d'inductance. Les bobines d'inductance sont triphasées et déphasées de 120º les unes par rapport aux autres.
Le moteur asynchrone est basé sur les courants induits dans le rotor par le champ magnétique du stator ; c'est pourquoi on l'appelle une machine à induction.
Pour induire un courant électrique dans le rotor, il est nécessaire que le rotor soit soumis à une variation du flux magnétique généré par le stator à la fréquence d'alimentation, ou synchronisme. Par conséquent, le rotor se démagnétise lorsqu'il atteint le synchronisme car il ne voit pas de variation de flux magnétique.
Pour cette raison, le rotor tourne à une vitesse différente de celle du champ statorique et tourne donc de manière asynchrone. Dans ces moteurs, le champ magnétique tournant a une vitesse synchrone en fonction de la fréquence de la ligne d'alimentation.
Une caractéristique importante du moteur asynchrone ou à induction est que la vitesse du rotor, et donc la puissance, ne peuvent pas être modifiées progressivement. La vitesse de fonctionnement des moteurs asynchrones dépend de la fréquence d'alimentation et du nombre de pôles.
Pourquoi les moteurs asynchrones sont-ils les plus utilisés dans l'industrie ?
Les moteurs à induction sont les moteurs les plus utilisés dans l'industrie en raison de leur robustesse et de leur prix, en particulier le moteur asynchrone triphasé. Ce succès est principalement dû aux raisons suivantes :
- Comparé à d'autres moteurs électriques de même puissance, son coût est inférieur.
- Ce sont des moteurs d'une grande simplicité avec une grande facilité d'entretien.
- Le moteur asynchrone a de meilleures performances par rapport au moteur monophasé. Pour cette raison, le moteur monophasé est relégué aux petits appareils de puissance et aux appareils électroménagers.
Les moteurs à induction sont également largement utilisés dans la construction de véhicules électriques.
Comment fonctionne un moteur à induction ?
La bobine du stator est alimentée par un courant alternatif. Grâce à la disposition des paires de pôles, déphasés les uns par rapport aux autres, le courant génère un champ magnétique général qui tourne dans l'espace avec la même fréquence que le courant d'alimentation. Ce champ magnétique est appelé champ statorique ou champ tournant.
Le bobinage du rotor est immergé dans ce champ magnétique tournant. Comme le rotor tourne plus lentement que le champ statorique, le flux magnétique sous-tendu par l'enroulement du rotor varie ; par conséquent, le champ magnétique tournant induit des courants dans le rotor par induction magnétique (loi de Faraday).
Ces courants induits génèrent à leur tour un champ magnétique rotorique qui s'oppose aux variations de flux. Le champ magnétique du rotor interagit avec le champ du stator, générant un couple dans l'enroulement du rotor qui fait tourner le rotor. La rotation du rotor fournit l'énergie mécanique dont nous pouvons profiter.
En effet, selon la loi de Lenz, le champ magnétique induit dans le rotor a toujours la direction opposée par rapport au stator.
L'induction dans le rotor ne peut se produire que si les vitesses relatives des champs du stator et du rotor sont différentes. Pour cette raison, le rotor tourne toujours à une vitesse inférieure à celle du champ tournant.
Types de moteurs asynchrones
La classification entre les différents types de moteurs asynchrones dépend de la tension du courant alternatif utilisé :
- Moteur asynchrone triphasé. Ce type de moteur utilise un courant triphasé de 400 volts.
- Moteur asynchrone monophasé. Ce type de moteur utilise un courant de 230 volts.
Moteurs triphasés
Un moteur triphasé est un type de moteur robuste qui ne nécessite pas de collecteur. La plupart des moteurs asynchrones triphasés ont une charge équilibrée. Ce sont des moteurs qui consomment la même chose dans les trois phases, qu'ils soient connectés en étoile ou en triangle.
Pour un moteur asynchrone triphasé, il peut être démarré de différentes manières : étoile-triangle, avec un variateur de fréquence, par des résistances statoriques ou par des résistances rotoriques.
Les tensions dans chaque phase dans ce cas sont égales au résultat de la division de la tension de ligne par la racine de trois. Par exemple, si la tension de ligne est de 400 volts, alors la tension de chaque phase est de 230 volts.
Moteur à cage d'écureuil
Le moteur à cage d'écureuil est un type de moteur asynchrone qui utilise un rotor appelé rotor à cage d'écureuil. Ce type de rotor est constitué d'une série de barres disposées dans les rainures de l'anneau rotor, réunies à leurs extrémités à deux anneaux. Le couple de démarrage est faible et le courant absorbé est élevé.
La grande majorité des moteurs asynchrones sont des moteurs à cage d'écureuil.
Moteur à rotor bobiné
Le moteur à rotor bobiné est un type de moteur électrique à courant alternatif. Dans ce type de moteur, les rainures de la bague du rotor sont insérées dans les enroulements réunis par un point commun. Ce type de moteur a des bagues en cuivre, appelées bagues collectrices, qui tournent avec l'arbre en contact entre celui-ci et des balais qui permettront de connecter les enroulements du rotor à l'extérieur.
L'avantage des rotors bobinés est qu'ils permettent un démarrage progressif au moyen de résistances rotoriques. Cependant, de nos jours, avec l'utilisation de démarreurs et de variateurs électroniques, ils ne sont pas nécessaires et leur fabrication est très limitée.